|
|

|

|
| e-Pub |
Section: New Results
Synthesis and Control of Human Functions
Ergonomics of the control by a quadriplegic of hand functions
Participants : Christine Azevedo Coste, David Guiraud, Wafa Tigra, Charles Fattal.
In subjects with complete Spinal Cord Injury (SCI) above C7, the four limbs are paralyzed (quadriplegia). Recovery of grasping movements is then reported as a priority. Indeed, most activities of daily living are achieved through upper limbs. Thus, restoration of hand and forearm active mobility could significantly increase independence and quality of life of these people and decrease their need of human aid. Although most of the subjects plebiscite pharmacological or biological solutions, only orthotics and Functional Electrical Stimulation (FES) allow, so far, to restore hand movements but they are rarely used. Ergonomics and comfort of piloting mode could partly explain the low usage of these systems. In this context, our aim is to explore possible solutions for subjects to interact with such devices. In this article we propose to evaluate the capacity of active upper limb muscles contraction to be used to intuitively control FES in tetraplegic subjects. In this study, we assessed the ability to gradually contract different muscles: trapezius, deltoid, platysma and biceps. Three subjects with C6 to C7 neurological level of lesion were included. We show that over the active upper limb muscles tested, contraction of the trapezius muscle was considered by the subjects as the most comfortable and could be employed as an intuitive mode of control of functional assistive devices.
Implementation of filtering, calibration and reconstruction algorithms dedicated to the use of inertial measurement units related to rehabilitation and movement analysis
Participants : Christine Azevedo Coste, Benoît Sijobert, Roger Pissard-Gibollet.
This work has been done within SENSBIO ADT.
-
An algorithm has been implemented for the sep by step stride length calculation from only one shank located sensor algorithm (calibration, segmentation and reconstruction) Experimental validation was done on 10 healthy subjects (error <10), 12 Parkinson disease subjects, and 7 hemiparetic subjects.
-
Comparison of different reconstruction algorithms
A Python programmed toolbox was developed for movement analysis (SensbioTK) in order to compare the performances of Mahony, Madgwick, Martin-Salaun sensor fusion algorithms.
-
Real-time MoCap data processing Matlab based software
The algorithm is based on Nexus SDK for rotation angle and translation calculation of a tracked object.
Dominant Component in Muscle Fatigue Induced Hand Tremor during Laparoscopic Surgical Manipulation
Participants : Sourav Chandra, Mitsuhiro Hayashibe, Asokan Thondiyath [IIT Madras] .
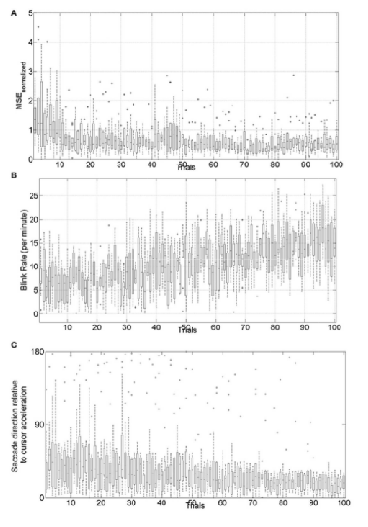
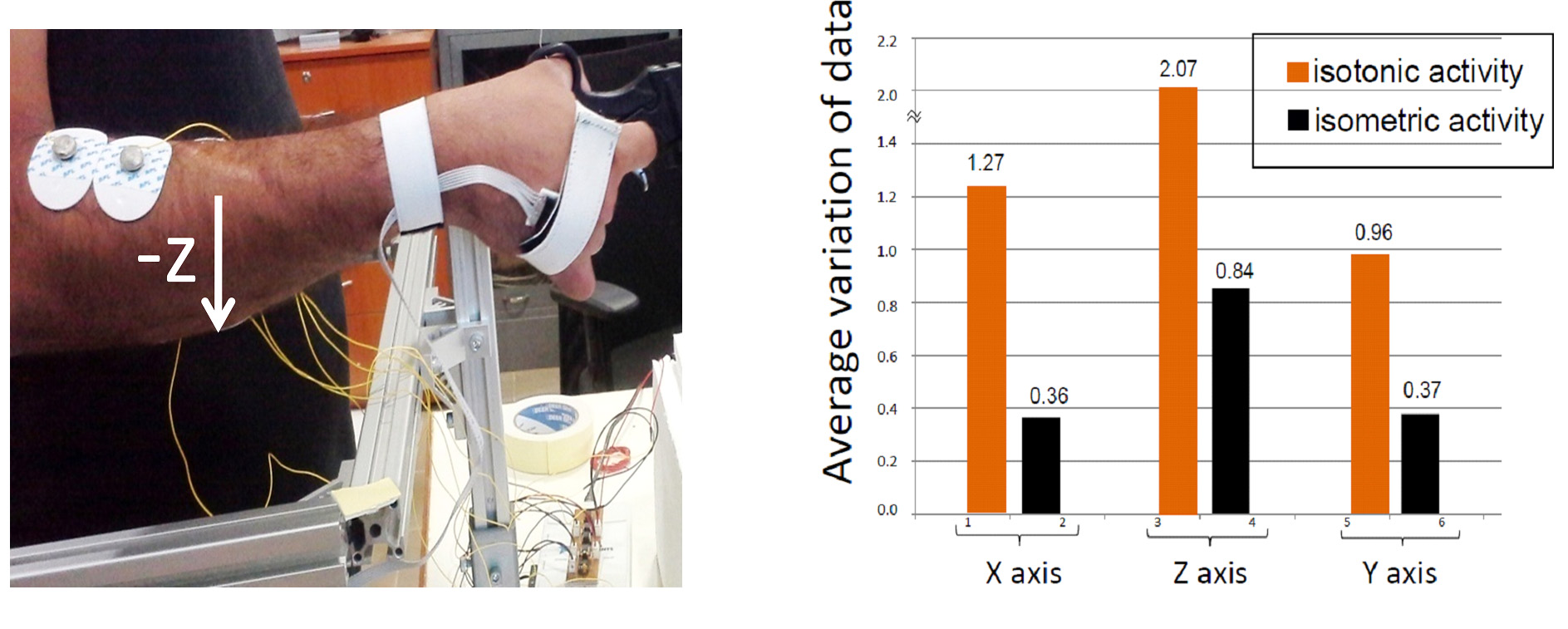
Accuracy of laparoscopic surgery gets affected by the hand tremor of the surgeons. Though cognitive load is inevitable in such activity which promotes tremor, muscle fatigue induced tremor is significant among the most important source of tremor. Characteristic of fatigue induced hand tremor and its dominant directional properties are reported in this work. For a fixed laparoscopic tool grip with temporally synchronized predefined task protocols, characteristics of fatigue induced tremors have been studied. Dominant component of tremor is found to be in the sagittal plane in case of both static and dynamic tasks. The results shown in the figure, sagittal plane (z axis) component of hand tremor is higher than the other directions. In order to relate it with the muscle fatigue level, spectral properties of surface electromyography (SEMG) were also investigated simultaneously. A study of transient effect on tool positioning was also included, which conjointly advocates the other experimental results on fatigue induced hand tremor as well. Currently a better metric for muscle fatigue is being analyzed and studied with a purview of relation in between SEMG and hand tremor (fig.9 ).
|
Human arm optimal motion analysis in industrial task for improving ergonomics of painful workstations
Participants : Nahema Sylla, Vincent Bonnet [TUAT, Japan] , Nahid Armande [PSA] , Philippe Fraisse.
In PSA Peugeot Citroen factories, high precision requirements of workstations make them being manual. One of the main goal of the car manufacturer is to minimize the pain of workers while maintaining high efficiency of production lines. Consequently, assisting operators with an exoskeleton is a potential solution for improving ergonomics of painful workstations while respecting industrial constraints [33] . We have developped a new approach based on inverse optimization to better understand human arm motion in industrial screwing task. The process combines several criteria to minimize such as energy expenditure or trajectory smoothness leading to the optimal trajectory of a typical screwing task, often performed by workers. Estimated joint trajectories are similar with the measured ones, with a mean square error of 4 degrees. The resulting cost-function is mainly composed of energy expenditure and geodesic criteria. Results show the relevance of using composite cost function in human motion planning [52] . This method has been applied to evaluate a 7 DoF exoskeleton in terms of motion control. The results of our study show that the hybrid composition of the free arm movement was accurately determined. At contrary, when wearing the exoskeleton, which produces an arbitrary determined torque compensation, the motion is different from the naturally adopted one. This study is part of the evaluation and comprehension of the complex neuromuscular mechanism resulting in wearing an exoskeleton several hours per day for industrial tasks assistance [49] .
A System for Real-time Online Estimation of Joint Torque with Evoked EMG under Electrical Stimulus
Participants : Zhan Li, Mitsuhiro Hayashibe, David Andreu, David Guiraud.
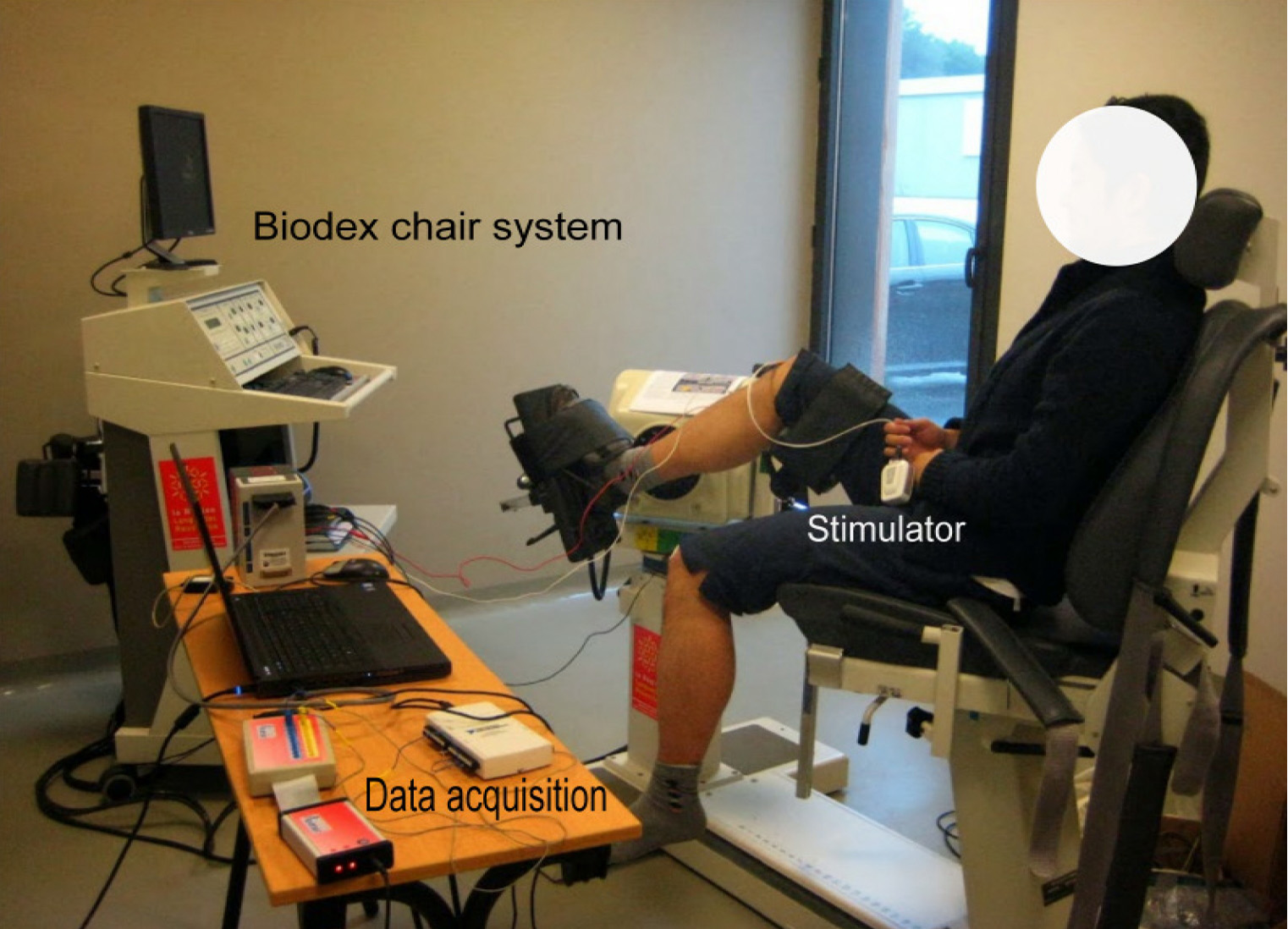
Functional electrical stimulation (FES) is a useful rehabilitation technique for restoring motor capability of spinal cord injured (SCI) patients by artificially driving muscle contraction through delivering electrical pulses. Real-time FES systems with online modulation ability are in great demand towards clinic applications. In this work, online estimation of joint torque with evoked electromyography (eEMG) in real-time environment is presented. The eEMG is acquired by National Instrument (NI) acquisition card and the stimulus is produced by wireless stimulator (manufactured by Vivaltis Inc., France). Kalman filter (KF) is adopted and embedded as the online estimator. Such real-time online torque estimation system produces promising results. Currently, the implementation to use EMG signal also from wireless Pod module is under investigation (fig.10 ).
Freezing of Gait Analysis and Detection
Participants : Christine Azevedo Coste, Benoît Sijobert, Roger Pissard-Gibollet, Christian Geny [CHU Montepllier, Neurologie] .
We have extended and optimized the work on Freezing Of Gait (FOG) and destination detection (Maud Pasquier PhD thesis, 2013). A new software for FOG Criteria based on cadency and stride length calculation has been implemented. Results were compared to Freezing Index (Moore et al., 2008) based on frequencies analysis of legs vertical acceleration. The comparison between detection and reality is done on the basis of video analysis of the performed tasks. A software has been implemented for the video labelization Matlab/VLC based tool, with graphical user interface, for marking and synchronizing events from a video (MovieFOG). 14 Parkinson disease patients were included in the study [12] [48] (fig.11 ).

A novel brain-computer interfacing paradigm for control of multi-DOFs robot with adaptive EEG decoding and synergetic environment adaptation
Participants : Saugat Bhattacharyya, Shingo Shimoda [RIKEN, Japan] , Mitsuhiro Hayashibe.
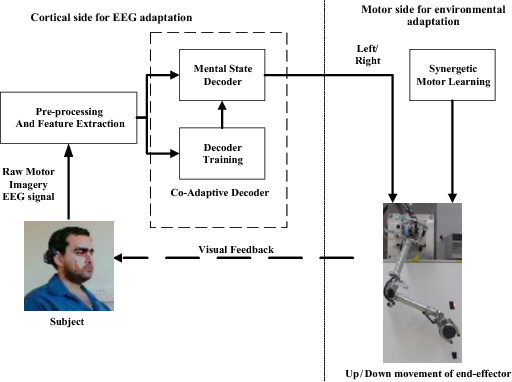
The study proposes a novel brain-computer interfacing paradigm for control of a multi-joint redundant robot system. Here, the user would determine the direction of end-point movement of a 3-dof robot arm using motor imagery electroencephalography (EEG) signal with co-adaptive decoder while a synergetic motor learning algorithm manages a peripheral redundancy in multi DOF joints toward energy optimality through tacit learning. As in human motor control, torque control paradigm is employed for a robot to be sensitive to the given environment. The dynamic condition of the robot arm is taken into consideration by the learning algorithm. Thus, the user needs to only think about the end-point movement of the robot arm, which allows simultaneous multi-joints control by BCI. The k-Nearest Neighbor based decoder designed for this study is adaptive to the changing mental state of the user. Offline experiments on the decoder reveals that its classification accuracy gradually increases at each learning stage. Online experiments also reveals that the users successfully reach their targets with an average decoder accuracy of more than 65% in different end-point load conditions. The details of the BCI control paradigm, shown in Fig.12 , is as follows: Initially, the robot is trained to its dynamic environment using a tacit learning approach for a fixed period of time. In this study, the load carried by the robot is treated as the environmental changes along with link segment inertial configuration changes. As a result, the movement of the joints of the robot adapts to the changing load. After the training of the robot, the subject begins his/her task of visualizing the target and decides on the direction of motion of the robot. Here, we have used left and right movement imagery to move the robot in upward and downward direction, respectively. Subsequently, the EEG signals (corresponding to the movement imagined) are pre-processed and their corresponding features are extracted. These features are used as inputs to the decoder which determines the mental state of the user and sends command to the robot to move in the equivalent direction.
|
Impact of the gaze direction on the skier trajectory
Participants : Christine Azevedo Coste, Benoît Sijobert, Roger Pissard-Gibollet, Nicolas Coulmy [FFS annecy] .
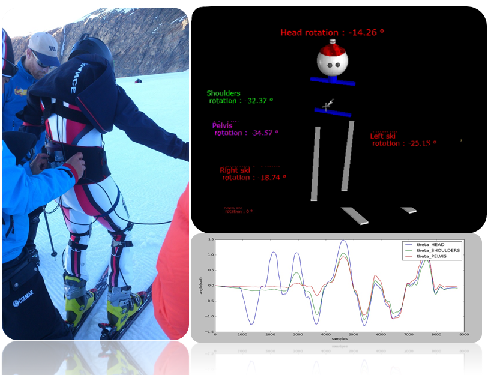
This work is done within a collaboration with the French Skiing Federation (FFS). Preliminary indoor tests for designing an experimental protocol using motion capture and inertial sensors was realized using a ski simulator and Motion Capture Tool from DEMAR (VICON BONITA). Indoor and outdoor experimentations were done with olympic skiers. In outdoor tests IMUs were combined with SMI eye tracking device. Preliminary analysis and data reconstruction has been done. A VPython script for 3D visualizing of skier movements was developed (fig.13 ).
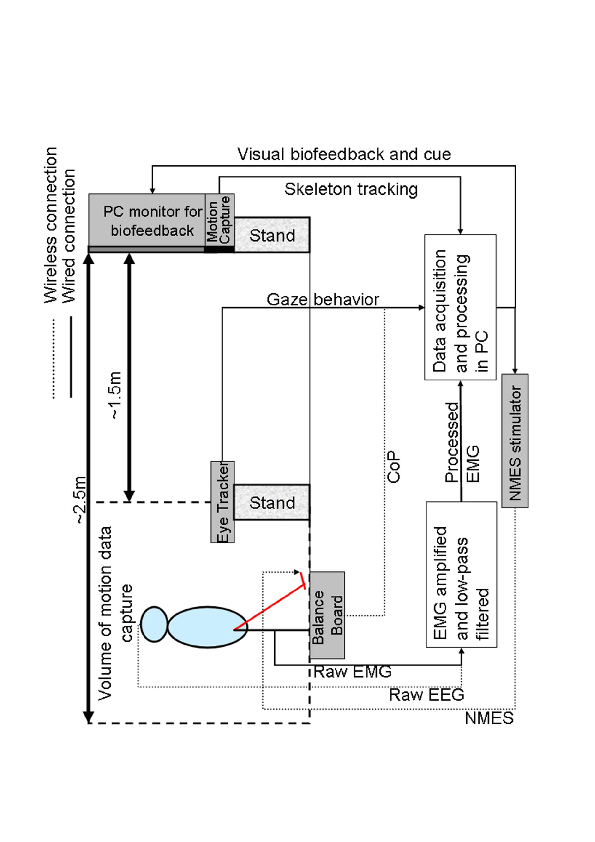
Development of a low-cost biofeedback system for electromyogram-triggered functional electrical stimulation therapy in conjunction with non-invasive brain stimulation
Participants : Anirban Dutta, Christine Azevedo Coste, Mitsuhiro Hayashibe, Uttama Lahiri, Abhijit Das, Michael A. Nitsche, David Guiraud.
Functional electrical stimulation (FES) facilitates ambulatory function after paralysis by activating the muscles of the lower extremities. The FES-assisted stepping can either be triggered by a heel-switch, or by an electromyogram-(EMG-) based gait event detector. A group of six chronic (> 6 months post-stroke) hemiplegic stroke survivors underwent transcutaneous FES-assisted training for 1 hour on stepping task with EMG biofeedback from paretic tibialis anterior (TA) and medial gastrocnemius (GM) muscles, where the stimulation of the paretic TA or GM was triggered with surface EMG from the same muscle. During the baseline, post-intervention, and 2-day-postintervention assessments, a total of 5 minutes of surface EMG was recorded from paretic GM and TA muscles during volitional treadmill walking. Two-way ANOVA showed significant effects in terms of P-values for the 6 stroke subjects, 0.002, the 3 assessments, 0, and the interaction between subjects and assessments, 6.21E-19. The study showed a significant improvement from baseline in paretic GM and TA muscles coordination during volitional treadmill walking. Moreover, it was found that the EMG-triggered FES-assisted therapy for stand-to-walk transition helped in convergence of the deviation in centroidal angular momentum from the normative value to a quasi-steady state during the double-support phase of the nonparetic. Also, the observational gait analysis showed improvement in ankle plantarflexion during late stance, knee flexion, and ground clearance of the foot during swing phase of the gait. Currently, we are conducting preliminary stroke studies to evaluate non-invasive brain stimulation as an adjunct to EMG-triggered FES therapy for movement rehabilitation [19] [22] .
|
Development and bench-testing of a low-cost eye tracking system (ETS) to measure gaze abnormality in stroke towards virtual reality based visuomotor therapy task.
Participants : Deepesh Kumar, Abhijit Das, David Guiraud, Michael A. Nitsche, Anirban Dutta, Uttama Lahiri.
We conducted a preliminary usability study while incorporating our novel low-cost ETS to measure one's eye gaze indices in response to presented visual task. The ETS provided gaze-related biomarkers which has the potential to be mapped to the probable abnormalities in one's eye movement pattern in stroke. Our preliminary findings with stroke-survivors and age-matched healthy participants indicate the potential of our low-cost ETS to provide quantitative measures of the difference in gaze-related biomarkers between the two groups of participants. Based on these preliminary results, we are conducting a clinical stroke study on ETS based screening and monitoring of performance during a virtual reality based visuomotor balance therapy task.